Posts
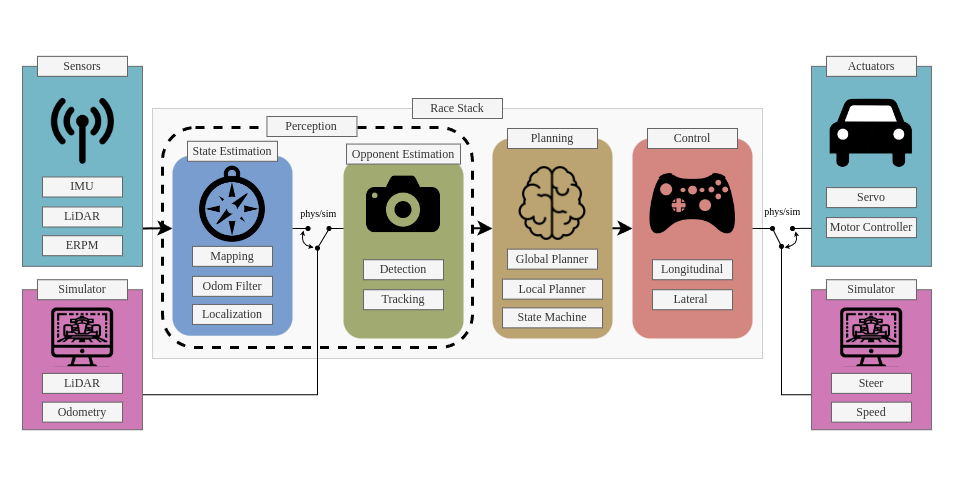
Introducing a new era of 1:10 scaled autonomous racing: We are thrilled to unveil the open-sourcing of the award-winning ForzaETH ...
A team comprised of five master students secured a prestigious second place in the Indy autonomous race simulation at the tech eve...
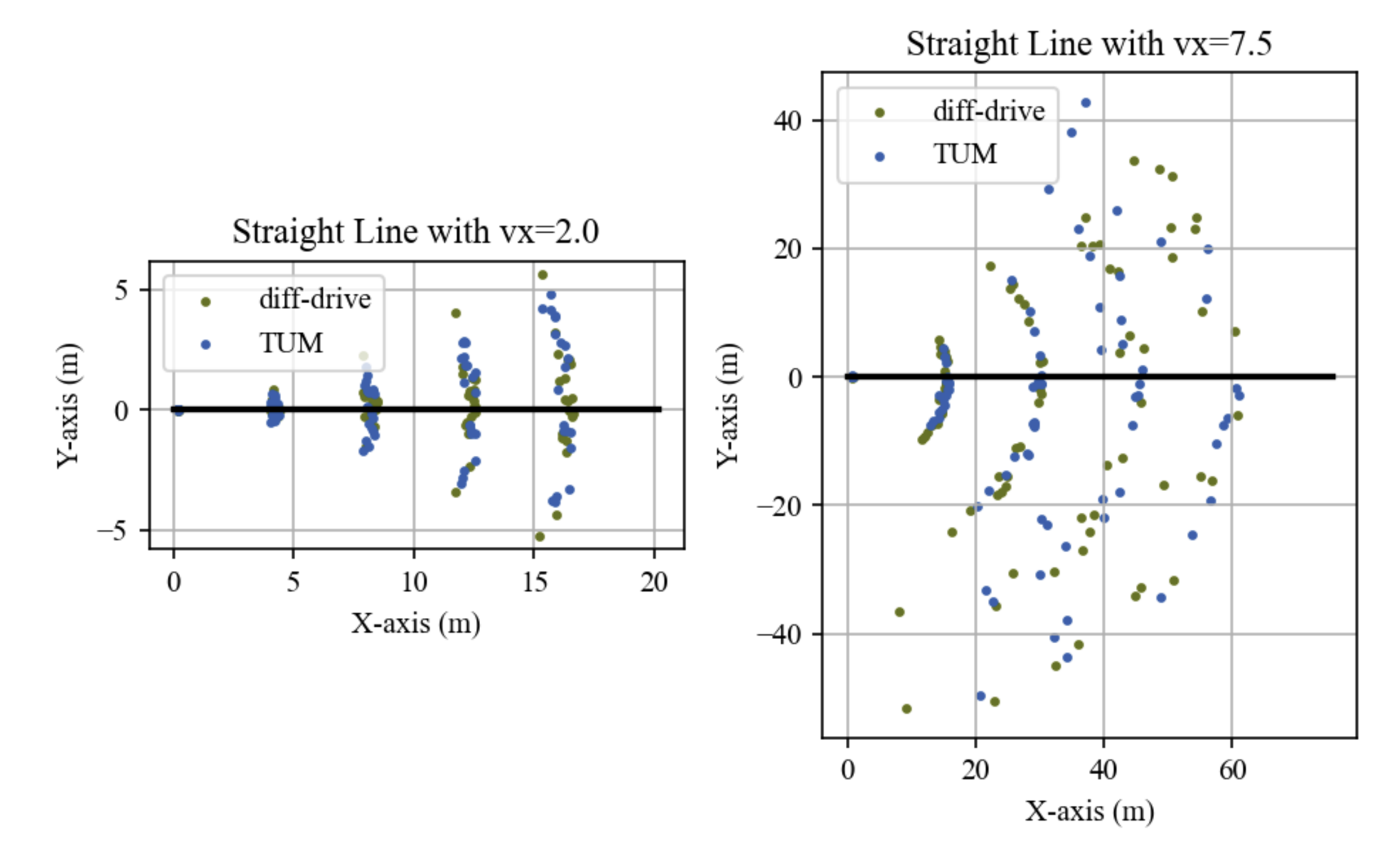
SynPF Paper Abstract This work introduces SynPF, an MCL-based algorithm tailored for high-speed racing environments. Benchmarked a...
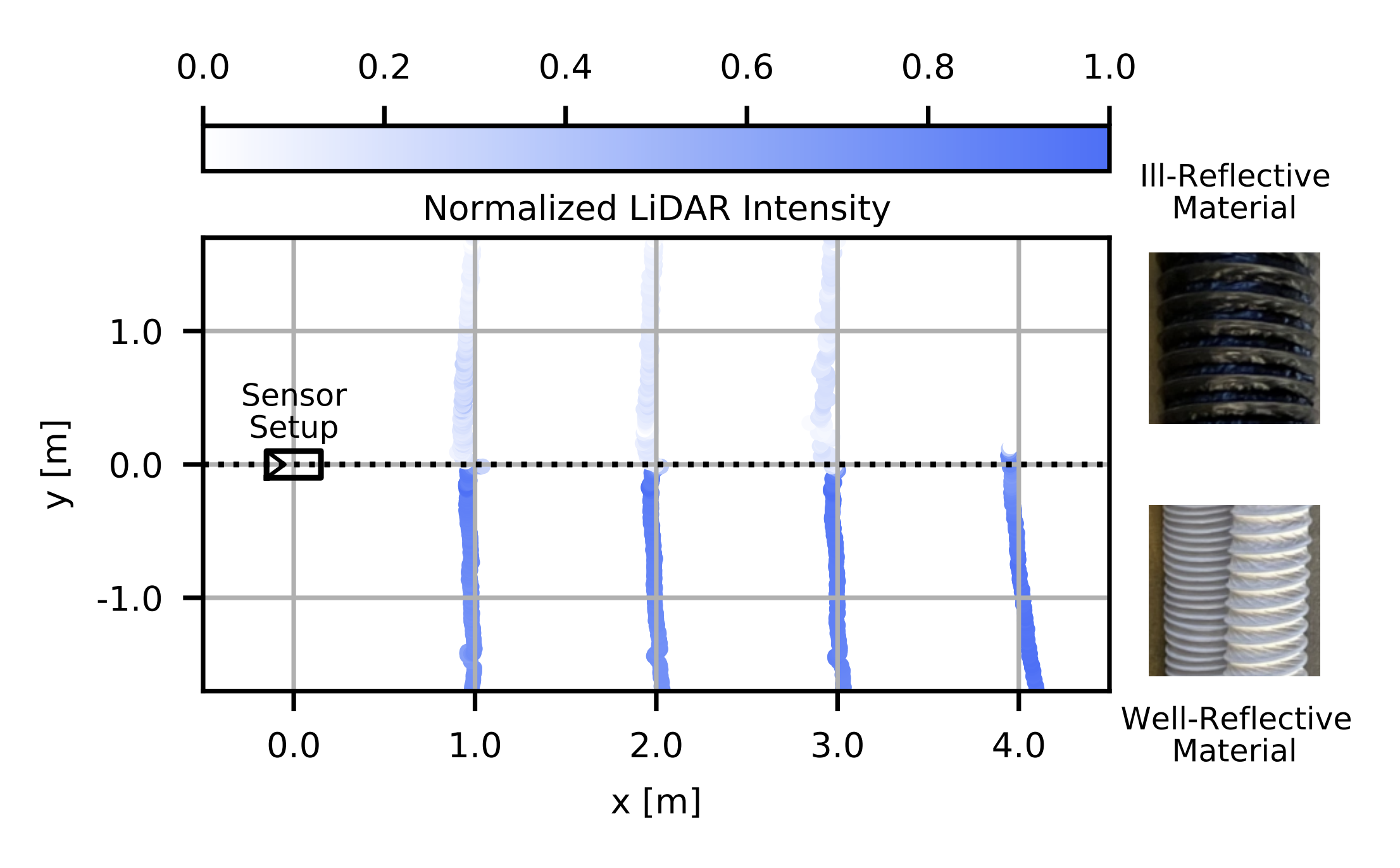
Abstract Range-measuring sensors play a critical role in autonomous driving systems. While LiDAR technology has been dominant, its...

Scientifica 2023 We showcased our autonomous racecars at Scientifica, Switzerland’s largest science festival. Alongside nume...

A dedicated team of six students devoted their efforts to enhancing the autonomous racing stack through their bachelor, semester, ...