Posts
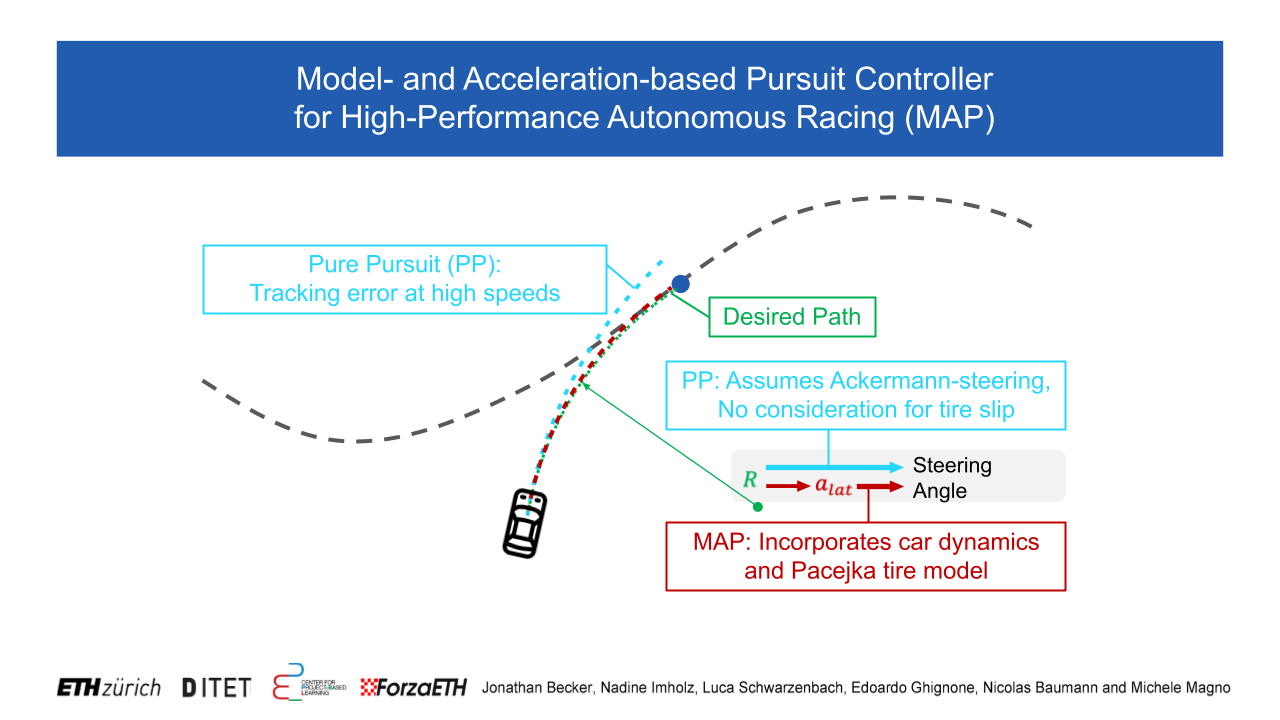
Model- and Acceleration-based Pursuit (MAP) Controller for High-Performance Autonomous Racing
MAP Paper A big reason for the teams outstanding performance at the F1TENTH Grand Prix is our Path tracking controller. Developed ...

TC-Driver: A Trajectory Conditioned Reinforcement Learning Approach to Zero-Shot Autonomous Racing
TC-Driver Abstract Autonomous racing is becoming popular for academic and industry researchers as a test for general autonomous dr...
Germany Race
On August 20 and 21, 2022, the ForzaETH team participated in its second race at the F1TENTH Grand Prix held at the Lausitzring Eur...

ICRA 2022
A group of students, consisting of three undergraduates and one master’s student, formed the inaugural Race Team. Together, ...