Control
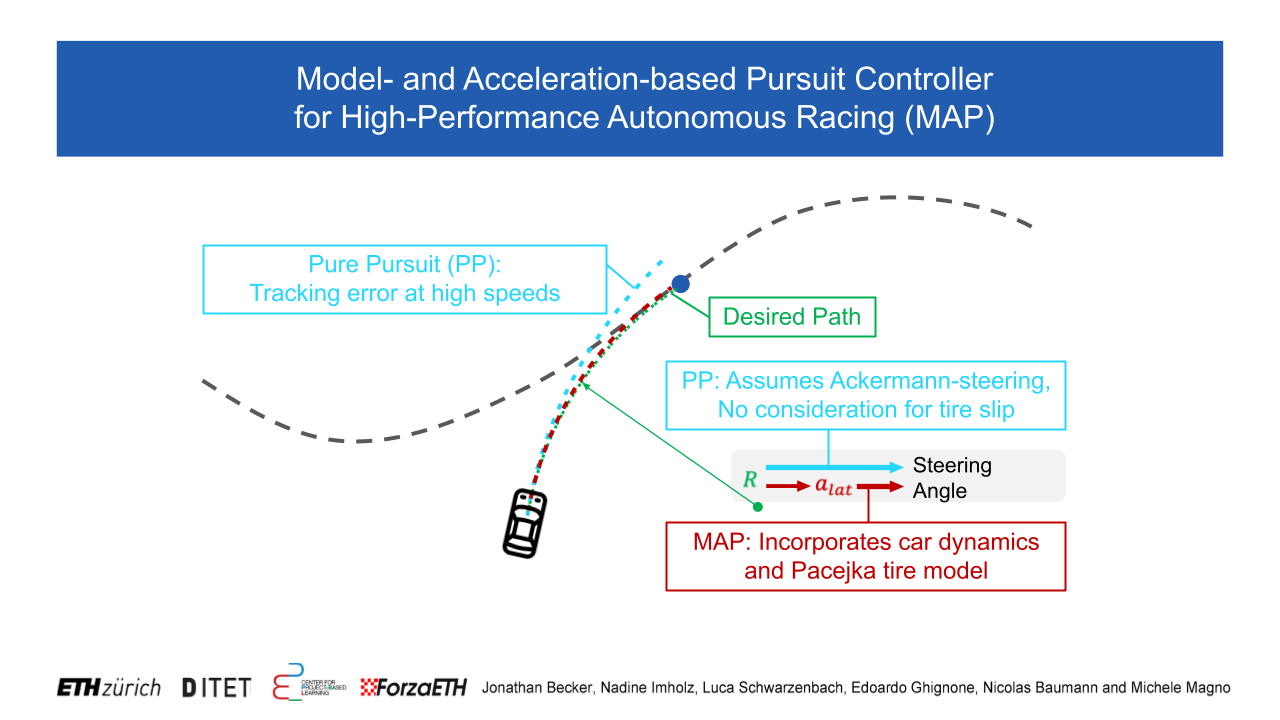
Model- and Acceleration-based Pursuit (MAP) Controller for High-Performance Autonomous Racing
MAP Paper A big reason for the teams outstanding performance at the roboracer Grand Prix is our Path tr...

TC-Driver: A Trajectory Conditioned Reinforcement Learning Approach to Zero-Shot Autonomous Racing
TC-Driver Abstract Autonomous racing is becoming popular for academic and indust...