Papers
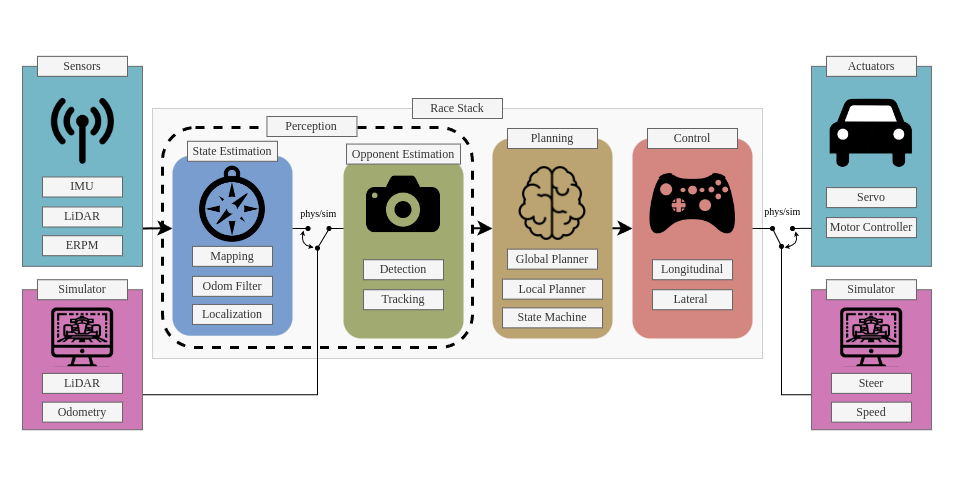
Open Source Race Stack and Full System Paper
Introducing a new era of 1:10 scaled autonomous racing: We are thrilled to unveil the open-sourcing of the award-winning...
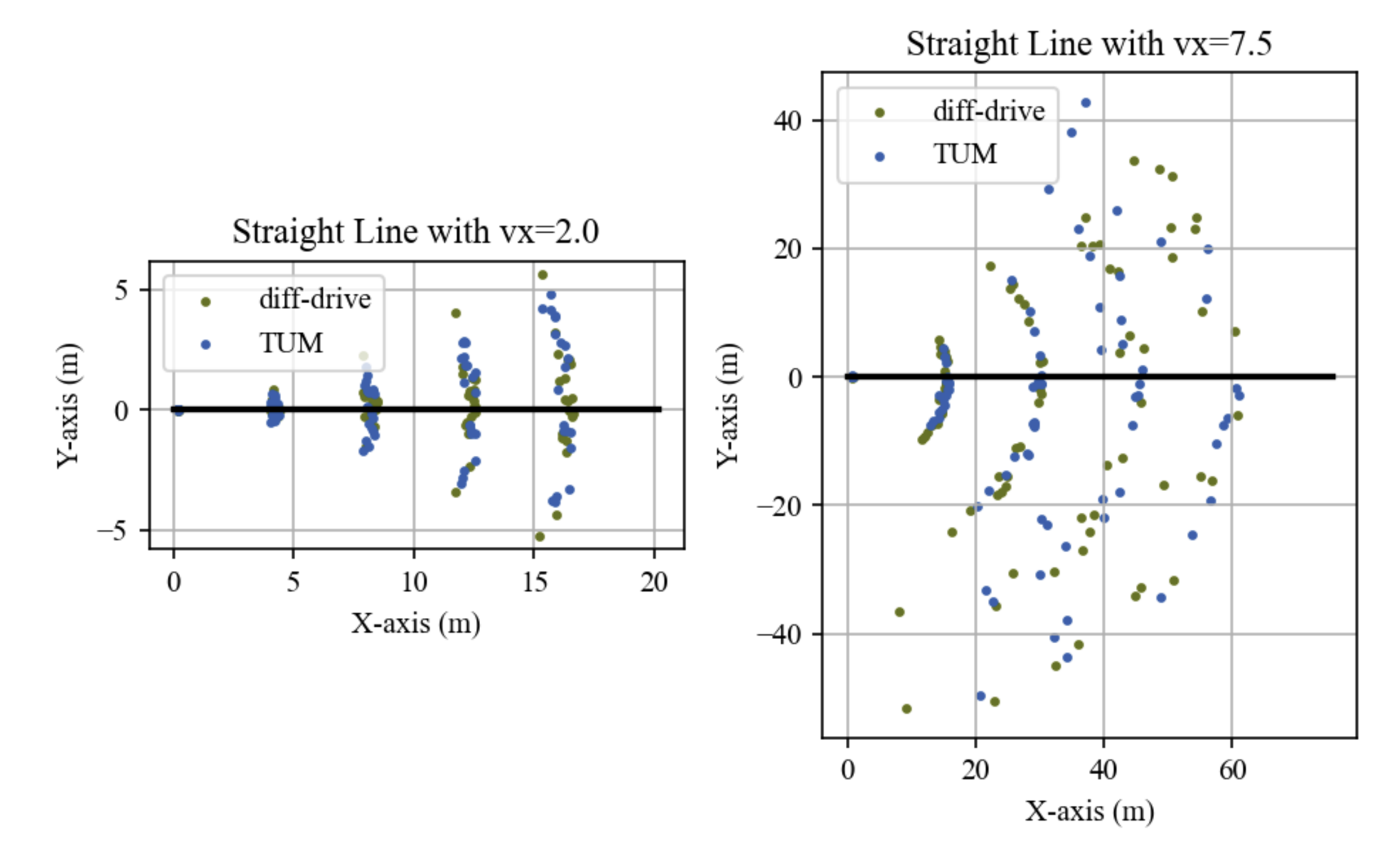
Robustness Evaluation of Localization Techniques for Autonomous Racing
SynPF Paper Abstract This work introduces SynPF, an MCL-based algorithm tailor...
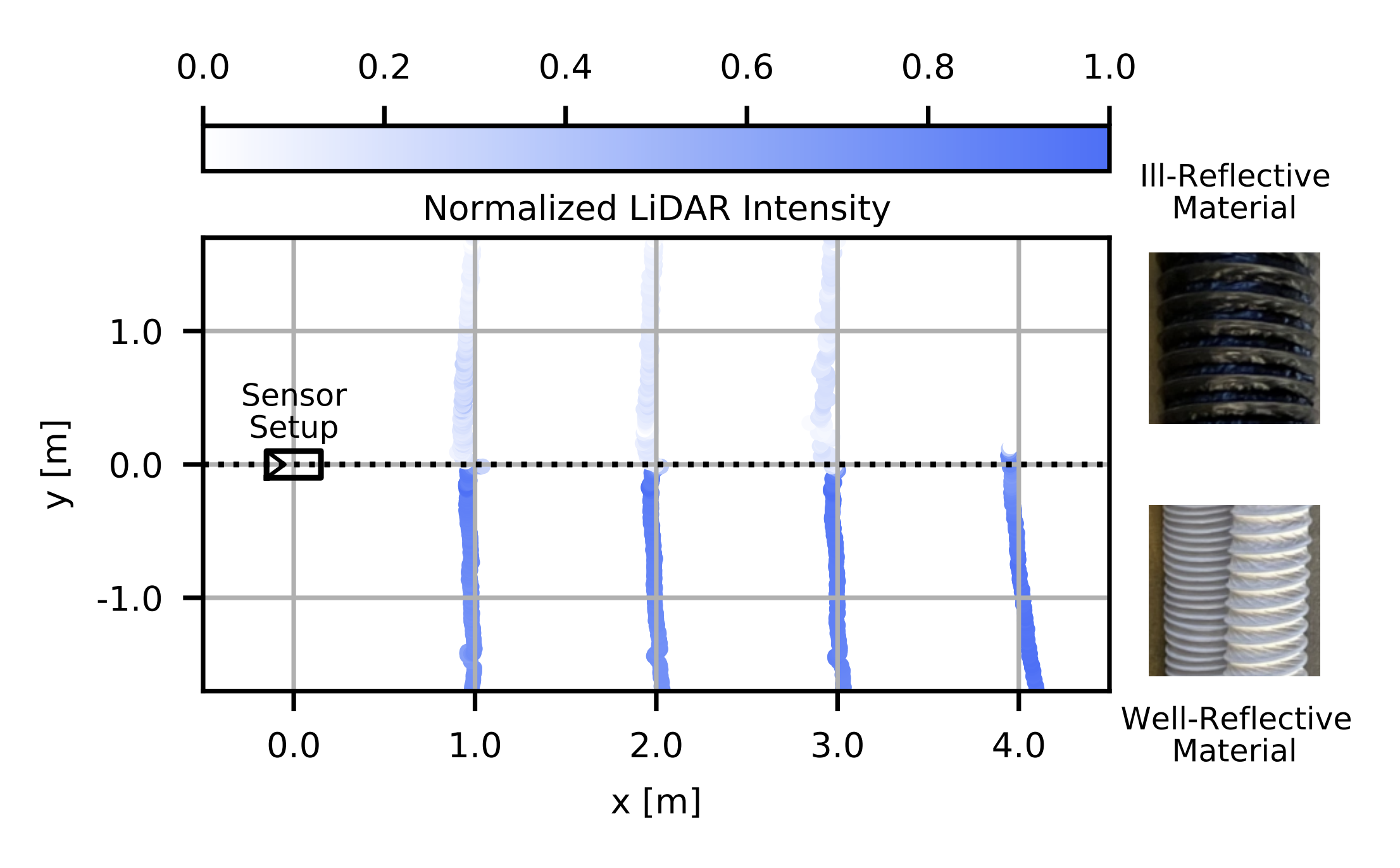
Assessing the Robustness of LiDAR, Radar and Depth Cameras Against Ill-Reflecting Surfaces in Autonomous Vehicles: An Experimental Study
Abstract Range-measuring sensors play a critical role in autonomous driving systems. While LiDAR technol...
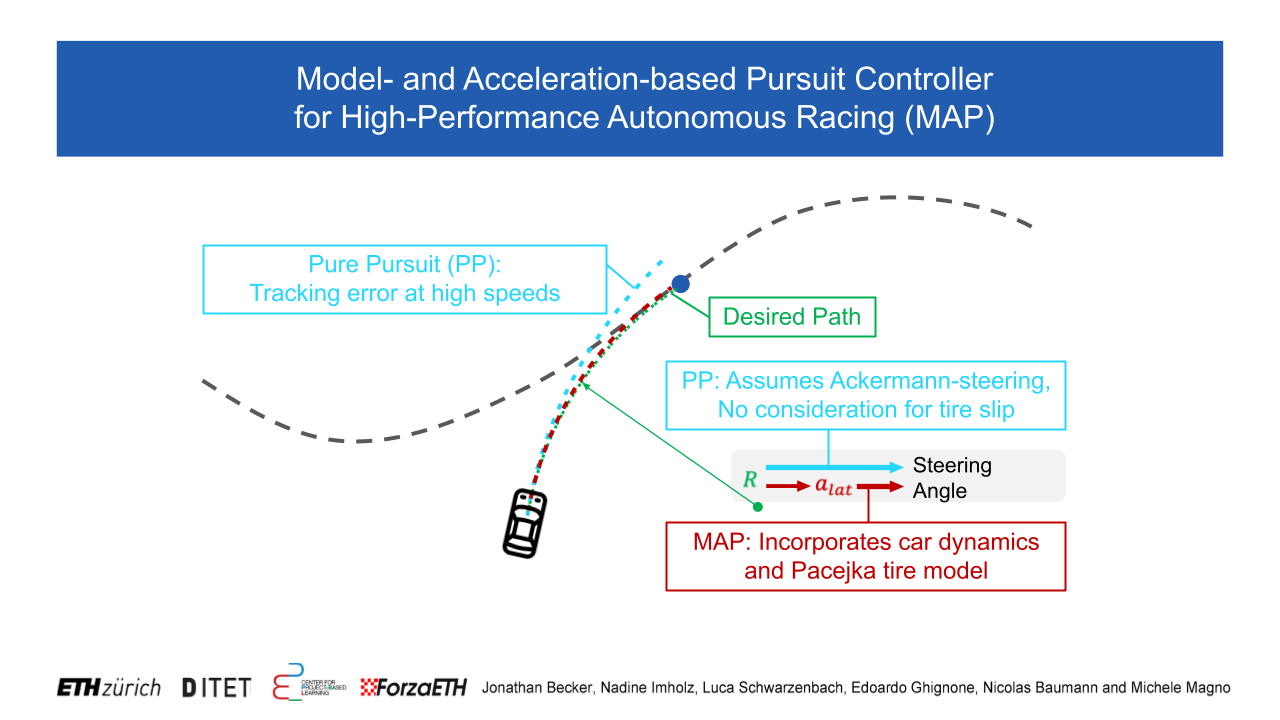
Model- and Acceleration-based Pursuit (MAP) Controller for High-Performance Autonomous Racing
MAP Paper A big reason for the teams outstanding performance at the roboracer Grand Prix is our Path tr...

TC-Driver: A Trajectory Conditioned Reinforcement Learning Approach to Zero-Shot Autonomous Racing
TC-Driver Abstract Autonomous racing is becoming popular for academic and indust...